Jumat, 29 Maret 2024
Laporan Akhir 1
== Percobaan 4 ==
Kontrol Motor Servo dengan PWMKontrol Motor Servo dengan PWM
- Membuka proteus
- Buka file proteus yang sudah disesuaikan dengan kondisi
- Running rangkaiannya
- Sesuaikan dengan kondisi yang diinginkan
Arduino Uno

LCD
.png)
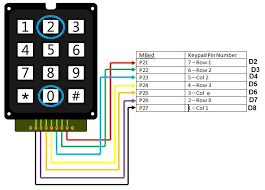
Keypad


#include <Servo.h>
#include <Keypad.h>
Servo servoMotor;
const int servoPin = 11; // Mendefinisikan PWM pin untuk servo
const int numRows = 4; // Number of rows in keypad
const int numCols = 3; // Number of columns in keypad
char keys[numRows][numCols] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'*', '0', '#'}
};
byte rowPins[numRows] = {9, 8, 7, 6}; // Rows 0 to 3
byte colPins[numCols] = {5, 4, 3}; // Columns 0 to 2
Keypad keypad = Keypad(makeKeymap(keys), rowPins, colPins, numRows, numCols);
// Calculate PWM step size
const int pwmStep = 255 / 8; // Jumlah tombol keypad minus 1, Langkah PWM 255/8 = 31 langkah
void setup() {
servoMotor.attach(servoPin); // Mendefinisikan pin yang akan digunakan untuk menghubungkan servo motor ke Arduino
servoMotor.write(90); // Initial position
Serial.begin(9600);
}
void loop() { //membaca tombol yang ditekan pada keypad dan menggerakkan servo sesuai dengan tombol
char key = keypad.getKey();
if (key != NO_KEY) {
Serial.println(key);
// Perform actions based on the key pressed
switch (key) {
case '1':
servoMotor.write(0); // PWM 0
break;
case '2':
servoMotor.write(pwmStep * 1); // PWM 28
break;
case '3':
servoMotor.write(pwmStep * 2); // PWM 56
break;
case '4':
servoMotor.write(pwmStep * 3); // PWM 84
break;
case '5':
servoMotor.write(pwmStep * 4); // PWM 112
break;
case '6':
servoMotor.write(pwmStep * 5); // PWM 140
break;
case '7':
servoMotor.write(pwmStep * 6); // PWM 168
break;
case '8':
servoMotor.write(pwmStep * 7); // PWM 196
break;
case '9':
servoMotor.write(pwmStep * 8); // PWM 224
break;
default:
break;
}
}
}
Modul 2: Percobaan 4 Kondisi 3
"Kontrol Motor Servo dengan PWM"
1. Analisa Kenapa Inputan PWM bisa mengatur pergerakan sudut dari motor servo, sedangkan pwm ini biasanya digunakan untuk mengatur kecepatan motor?
Jawab:
Pulse Width Modulation (PWM) mengatur kecepatan motor dengan cara mengatur lebar pulsa sinyal yang diberikan ke motor. Motor servo biasanya mempunyai sebuah motor DC yang dikendalikan oleh suatu rangkaian elektronik yang menerima sinyal pulsa. Semakin panjang durasi pulsa PWM, maka sudut posisi motor servo akan semakin jauh.
2. Pada percobaan apa yang terjadi ketika kita membuat servowrite ( 255 ) pada program?
Jawab:
Jika pada percobaan menggunakan servowrite(255) maka ini mengatur posisi motor servo ke posisi maksimum. Biasanya, nilainya berkisar antara 0-180. Maka, saat menjalankan servowrite(255) nilai yang diterima adalah 180 derajat atau berputar 180 derajat.
3. Bisakah ADC (pengganti PWM)di gunakan untuk membuat motor servo berputar?
Jawab:
Bisa. Namun, diperlukan komponen tambahan untuk menghasilkan sinyal PWM dari nilai yang dibaca oleh ADC dan driver motor servo


